

Northeastern University Launch Initiative (NULI) is AerospaceNU’s solid-fuel rocketry section. As a student-led team, we complete independent research and development (IRAD) projects and participate in the NASA USLI competition. Our projects cover a wide range of topics, from airbreaks research and internal mechanics, to avionics design and propulsion. We strive to teach new members about rocketry while also engaging students of all ages in STEM activities.

Airframe
The airframe of a rocket is the structural skeleton, the outer protective skin that houses the motors, electronics, and payloads which incorporates subsystems from all teams.
This semester, several AeroNU subteams are working on airframe projects. These subteams include Air Breaks, LRE Airframe, and Carby V4.
-
Air Brakes is a system that will lead into competing in the NASA USLI competition again. It is designed to slow down the rocket during ascent, making it easier to reach a specific target altitude. This capability is critical for the NASA competition, as teams must declare their intended altitude four months before the launch. Developing Air Brakes will not only improve our chances in USLI and similar competitions, but also provide both new and returning students with valuable experience in full-cycle project development.
-
LRE Airframe will be designing a launch vehicle for AerospaceNU’s custom liquid rocket engine (LRE). This will be the 2nd iteration of a liquid-propelled rocket, continuing from where the Mark 1 project left off in 2023. We will be creating a new engine/tank structure in tandem with the LRE team, with an emphasis on efficient integration and flight safety. The Airframe team will also be responsible for building the rest of the rocket to meet stability and performance requirements for the engine specifications.
-
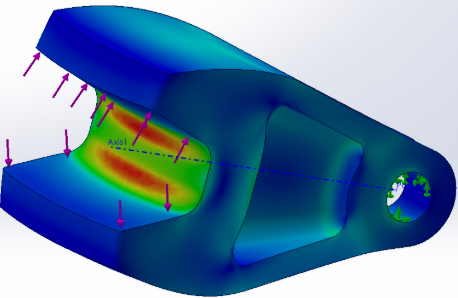
Carby V4 is a continuation of several previous proejcts: the carbon fiber rocket and the internal clamp. The overall objective is to design and fabricate a two stage rocket with a carbon fiber body that targets Mach 2.5 flight speed. Major areas of design have included the pneumatic stage separation mechanism, fin geometry and layup, and enhanced video. The pneumatic clamp, designed to separate the two stages of the rocket, has been fully designed and manufactured. Test layups for the fins have also been conducted, while full assembly of the rocket will begin in the fall.




Avionics
Avionics refers to the electronics responsible for flight control and telemetry in a rocket. Our The Avionics subteam supports all NULI Rocketry projects with electronics and software.
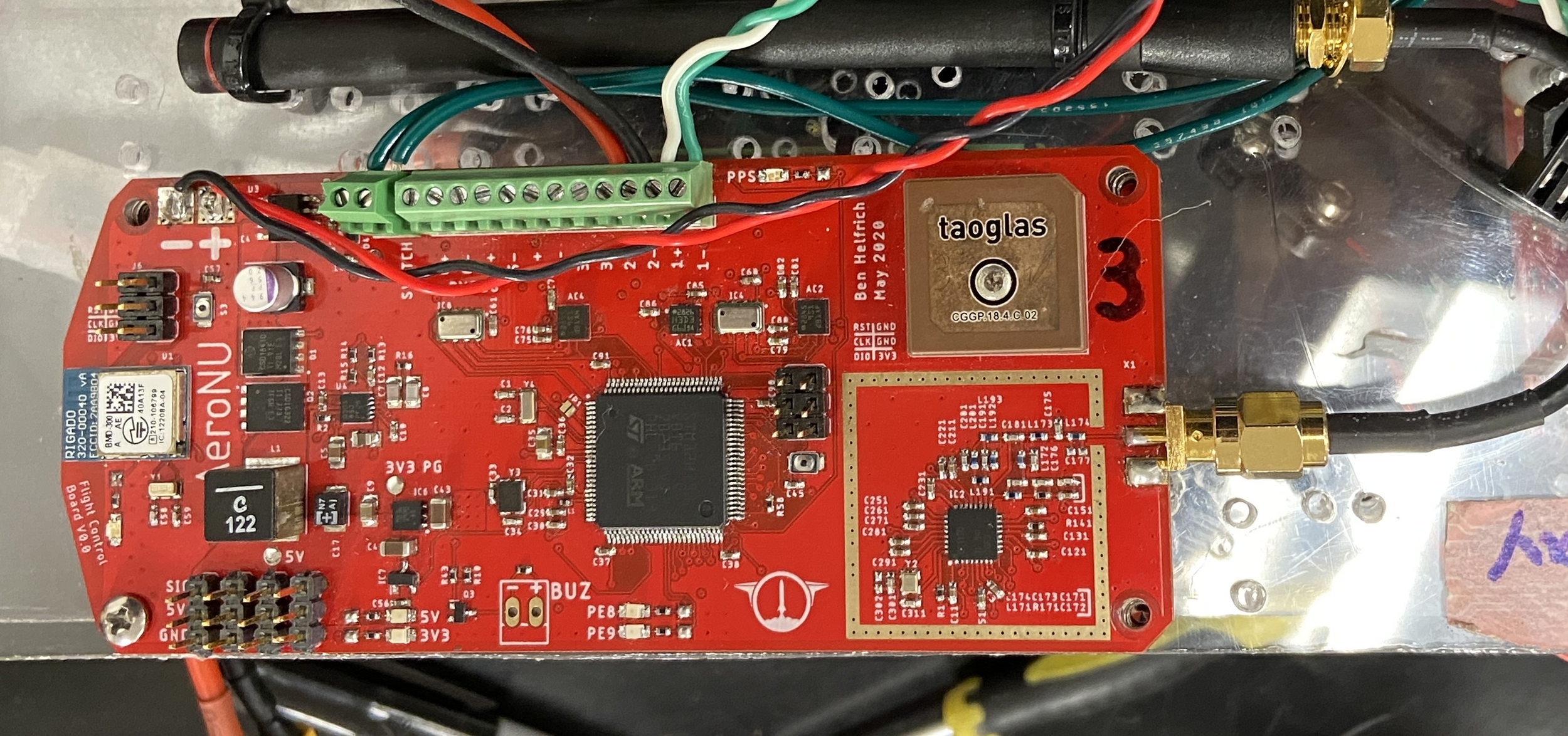
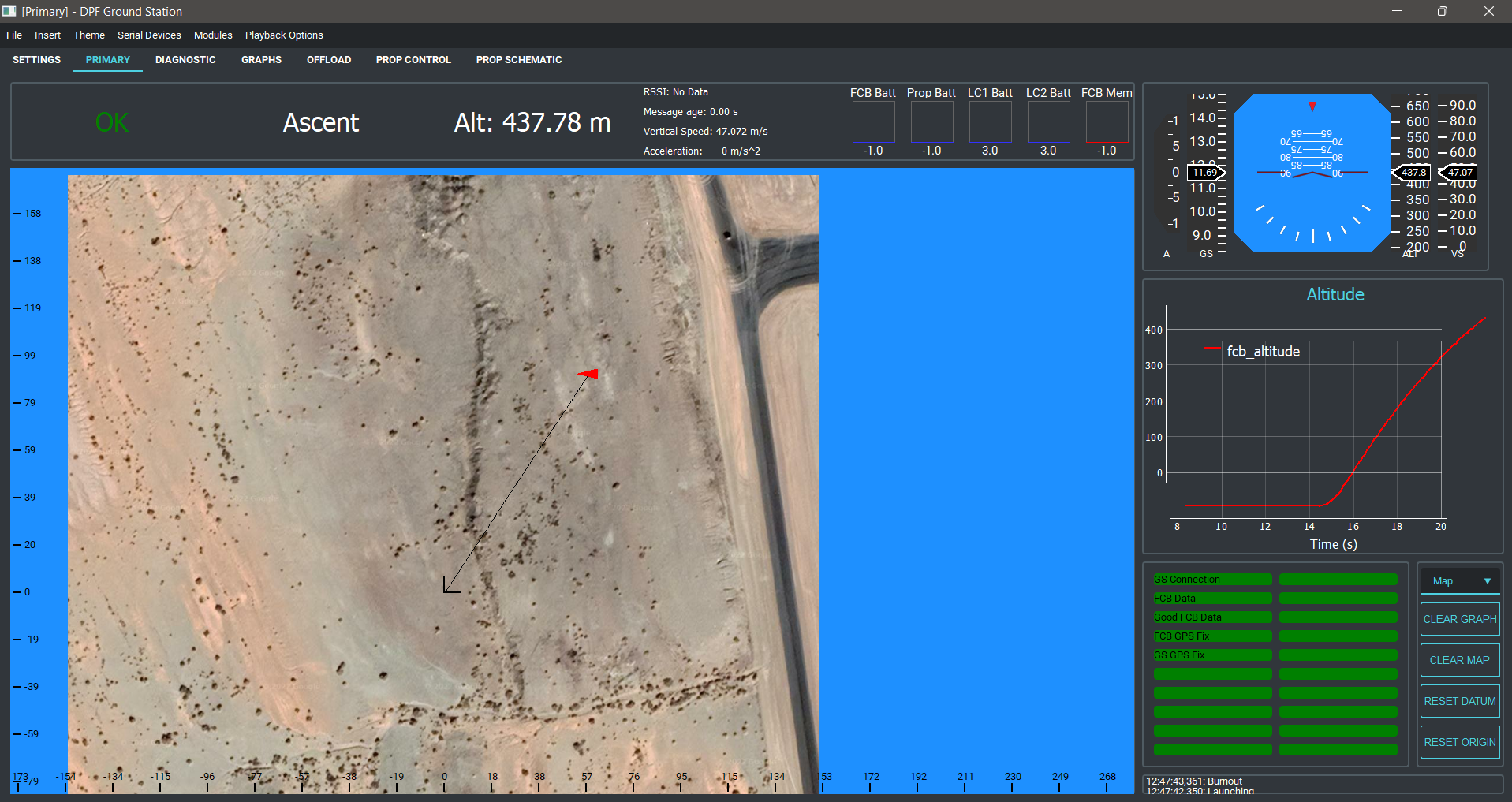
In the past, we have developed the payload circuitry for the NASA USLI challenge, including a HAM radio transmitter. Another one of our main projects is our Flight Control Board, or FCB. These custom-designed printed circuit boards (PCBs) have a wide range of sensors including barometers, accelerometers, gyroscopes, and magnetometers which are all used for collecting data during rocket flights and deciding when parachutes or separation mechanisms should be deployed and controlled. FCBs also include radio and GPS that allows us to track rockets from the ground with a custom desktop application which shows flight data in real time.To date, we have had over 20 successful FCB-controlled flights and continue to use them in more interesting and complex ways.
Avionics currently supports a custom dual deploy altimeter (SillyGoose), as well as commercial flight controllers (StratologgerCF & EasyMini) for Rocketry flights. They are currently working towards a flagship flight controller (VOLT) that can adapt to any rocketry needs via an expansion port. Avionics (both current and past) hardware and software has been tested on multiple successful rocket launches, and to date has never been responsible for a rocket failure. They are also currently in development of a new and improved ground station. Currently, it has capabilities to connect to and talk to our SillyGoose over serial, with more capabilities in the works.
The summer goals of the Avionics team are to complete the hardware development of the VOLT controller, support the launch attempt in May, and complete development of a new custom 915MHz LoRa radio board.
Project Legolas
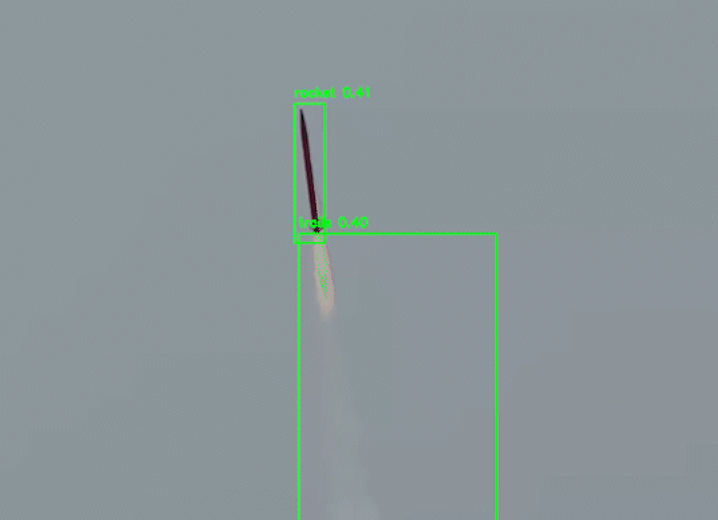
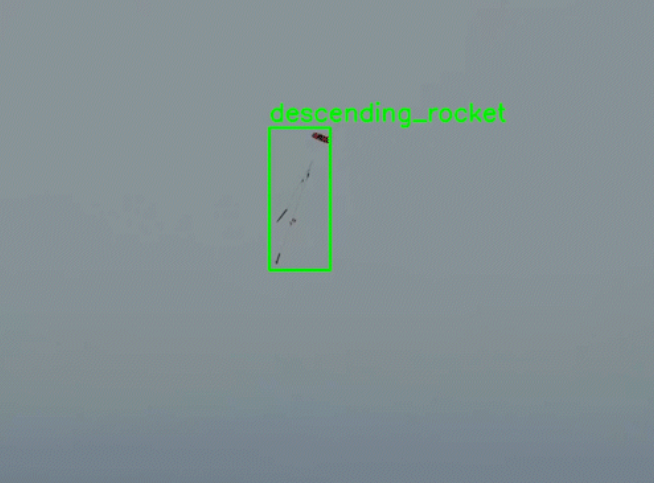
Project LEGOLAS (Long-range Electronic Guided Optics and Launch Assessment System) is a project to design a computer vision camera control system for capturing high-resolution tracked images and video of club rocket launches. These high quality images are valuable for tracking rocket performance and flight characteristics, as well as diagnosing any abnormalities experienced during flight. Members will gain significant experience working with low-latency vision processing and control systems and will become familiar with industry standard hardware and software systems for running machine learning-based computer vision.
Last semester, we made great progress and redesigned how we will be tracking the rockets and the model we used. Legolas will be continuing to work on the tracking capabilities of the model. Our next steps this semester will be getting the gimbal to work, and from there, being able to connect the model and the gimbal so we can actually start testing them together.


Previous Projects:

-
2022-2023
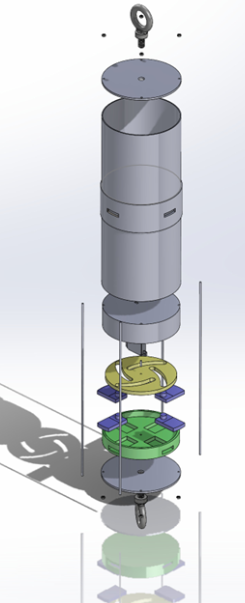
Mark I (pictured) is similar in form to the liquid vehicle, and will enable Redshift to test construction methods and systems beyond the scope of test bed rockets that the club has previously built. A successful launch of Mark 1 will lead to the development of MK2 which will also test the construction and ability to carry a liquid rocket engine. -
2023
The two-stage rocket was developed to allow newer members to understand the development & structure of a rocket while also challenging the experienced engineers within the club to build something unique! It will be built with custom electronics developed by the team, in addition to a fully modular and expandable airframe based on our lego-inspired 'paneling' concept. -
2020-2024
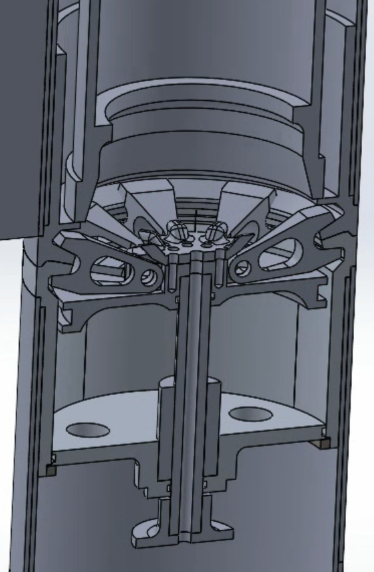
Internal mechanics handled the mechatronic systems and other moving parts within the airframe.In the past, Internal Mechanics developed several mechanisms for parachute disreefing, eventually settling on a nichrome-based line cutter. This allows NULI to use a single large parachute rather than deploying a series of different sizes.
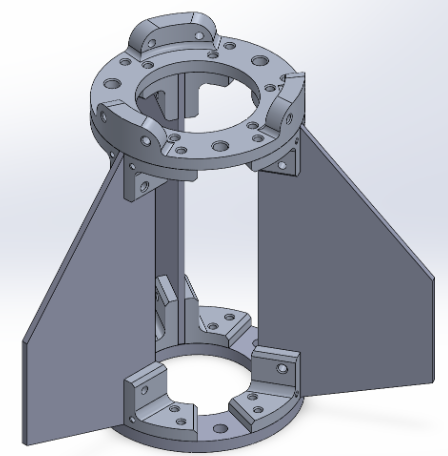
The team is currently working on our Marman clamp, which is a mechanical separation device that will take the place of black powder charges on our liquid-fuel rocket. Internal Mech is also developing a completely custom-designed separation device to fly on smaller rockets, as well as an 11-foot tall, 6-inch diameter solid-fuel rocket to use as a testbed for our projects.
-
2023 - 2025
The Wind-Yielded Autonomous Trajectory Tracking rocket (W.Y.A.T.T.) is a guided decent project. The guided descent project is focused on constructing a testbed rocket to launch with a guided descent system. This system will use a parafoil kite as a parachute, with motors controlling the length of the steering lines of the kite. GPS data will be used wit the goal of autonomously steering the rocket with the parafoil kite to the launchpad. This project is a continuation of the work of Internal Mechanics

Meeting Time: Monday 8-10pm, Location: Forsyth 244






